[1]. A BLOCK DIAGRAM OF MYOELECTRIC HAND..

[2]. HISTORY:-
Prosthetic hands give hope for amputees to recapture their ability to perform complicated
physical movements of the lost human hands. Electromyography (EMG) is a suitable approach
for human-machine interface in the prosthetic hands control. The first artificial hand controlled
by EMG was developed in Russia by A. E. Kobrinski in 1961. The Otto Bock Orthopedic
Industries developed an EMG controlled multi-finger hand in 1965. In 1980’s and 1990’s,
high-tech solutions were emerging which used new material and miniaturized components. Users
can comfortably wear the lightweight electrically powered prosthetic hands during an eight hours
day . Integrated with modern computer system the future prosthetic hand probably can
accept command direct from the human nerve system and perform multiple tasks. This technique
can also be used in robot hand control such as remote dextrous manipulation devices , or
teleoperation.
[3] ELECTROMYOGRAPHY:-
The Electromyography (EMG) is the signal measured by placing conductive elements or
electrodes on the skin surface, or invasively within the muscle. Surface EMG, or skin EMG is
used more often because its non-invasive character makes it safer and easier to use. The
Electromyography (EMG) is useful in the field of both medicine and engineering. This section
describes the relevant background knowledge on muscle architecture and how the muscle
electricity is generated and detected.
[3.1] muscle physiology:-
The skeletal muscles implement our body movements. They are attached to adjacent
bones via tendons, and function to induce movement at the joint formed where the two bones
meet. Skeletal muscle comprises the largest single organ of the body. Each of these individual
muscles is composed of single cells or fibers embedded in a matrix of collagen.
The muscle cells are roughly cylindrical, with diameters between 10 and 100 um but up
to a few centimeters long. They may be arranged in parallel and bound by a connective tissue
envelope into a homogeneous bundle. A myofiber is a multinucleated single muscle cell. It’s
basically water with some dissolved ions separated from the extra-cellular space that is mostly
water with some dissolved ions. It generates a potential difference across its cell membrane by
having different concentrations of ions.
The fibers are excitable cells. Excitation signals are received at the synapse. Then a rapid
depolarization occurs and is coupled with a contraction. It’s a process during which
electrochemical events occur. The action potentials are propagated along the sarcolemma, or cell
membrane, toward the end of the fiber and downward from the surface into the transverse tubular
system. The propagation of the action potential along a nerve or muscle fiber includes the flow
of ions and gives rise to extra-cellularly recordable potential gradient. These potential gradients,
moving in both time and space, constitute the electricity as recorded from active muscle fibers
. Thus the small currents are generated prior to the generation of muscle force.
The myofibers are the smallest complete contractile systems and are arranged in
functional units called motor units. A motor unit is simply the cell body (motor neuron), its axon
and all of the muscle fibers that it innovates (attaches to provide the signal for contraction). Each
motor unit has a characteristic innervation ratio that is the number of muscle cells (muscle fibers)
controlled by one neuron. The number of muscle fibers belonging to a single motor unit varies
widely from muscle to muscle. One whole muscle has many motor units.
[3.2] acquisition of emg :-
As the brain's signal for contraction increases, it both recruits more motor units and
increases the "firing frequency" of those units already recruited. All muscle cells within one
motor unit become active at the same time. By varying the number of motor units that are active,
the body can control the force of the muscle contraction. When individual motor contract, they
repetitively emit a short burst of electrical activity known as the motor unit action potential
(MUAP). It is detected by electrodes on the surface of the skin in proximity of the motor. The
detection is illustrated in the following figure ...

The function unit of a muscle is the motor. All the fibers which belong to one motor are
activated at the same time. The motor unit action potential (MUAP) is the electrical response to
the impulse from the axon. A MUAP looks like the following figure.action potential per one motor unit..
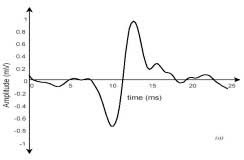
The primary factors that determine the shape of a MUAP are the diameter and
geometrical arrangement of the muscle fibers, the tissue filtering effect, and the properties of the
recording electrode and instrumentation.
The contraction of a muscle recruits a number of motors during a period of time. When
several motor units are active (the timing of the electrical burst between distinct motor units is
mostly uncorrelated), a random interference pattern of electrical activity results. The time
between successive bursts is somewhat random for each motor unit.
EMG technology enables us to record the action potentials from an entire muscle or a
large portion of it by putting electrodes on the surface on the skin. It is a summation of the
interfered motors’ MUAP, which is also the summation of small currents from the fibers
belonging to variant motors. Therefore it looks quite different with MUAP. The following Figure
shows how the detected EMG signals and its spectrum appear. We can observe that the EMG
signal of greatest amplitude is detected by put the electrode at proper locations on the surface the
muscle .

It is well established that the amplitude of the EMG signal is stochastic (random) in
nature and can be reasonably represented by a Gausian distribution function. The instantaneous
value of EMG signal contains no information. The random nature of the action potential of the
motor makes EMG to be stochastic. The usable energy of the signal is limited to the 0 to 500 Hz
frequency range. Usable signals are those with energy above the electrical noise level . There
are many factors that influence the EMG signals’ detection. These include the electrode structure
and its placement on the surface of the skin above the muscle. The physiological, anatomical and
biochemical characteristics of the muscle can also influence the EMG signals .
[4]. blockdiagram description of upper figure shown first..
The nerve system sends action potentials to the muscle cells. Then small currents are
released immediately. The EMG signals are detected with the electrodes on the skin surface of
the amputees remaining limb. The raw analog EMG signals are collected and pre-processed
(filtering, sampling, etc.) and then converted to the raw digital EMG data. These digital data are
sent to an integrated microprocessor system for the feature extraction and classification. Then
signals for position and force control are computed. The motors’ drivers produce the actual hand
motion based on the control signals.
This control scheme is capable of recognizing a multitude of volitional prehensile
movements, making the hand control transparent in a sense that the subject can move the hand in
a most natural way as if he/she would do with a healthy hand .
The feature extractor and grasp classifier modules are important to this control scheme
because the real time response depends much on if a shorter time period of signal can be used to
produce a good classification accuracy.
No comments:
Post a Comment